Цель данного проекта заключается в том, чтобы создать передвижную конструкцию со следующими параметрами:
Конструкция должна преодолевать поверхности с твердым грунтом, болотистую и даже водную. Для этого была выбрана форма в виде шара.
Иметь дистанционное управление с большим радиусом действия.
Вся система состоит из:
Вездеход.
Пульт управления.
Вся конструкция вездехода состоит из нескольких элементов:
Корпус шаровидной формы. Для этого был использован пластиковый корпус глобуса.
Рама (опорная конструкция).
Модуль управления движения вперед и назад.
Модуль управления движения влево и вправо.
Два электромотора. Один служит для движения вперед и назад, а другой для поворотов влево и вправо.
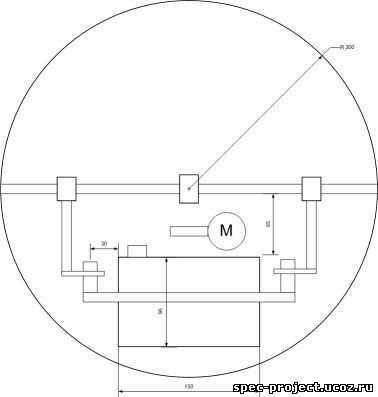
Конструкция шара состоит следующим образом: в каждой полусфере корпуса ровно по середине просверлены отверстия, в них жестко крепится ось с помощью гаек. Силовая рама подвешена на оси в двух точках через подшипники скольжения (можно и шарикоподшипники). На горизонтальной силовой оси по центру подвешена двигательная система. Работа такой конструкции заключается в следующем: так как рама держится на оси и имеет большой вес 2-4 кг (в зависимости от аккумулятора), она находится в неподвижном состоянии, тем самым электродвигатель, вращая ось вращает корпус приводя конструкцию в движение.
Поворотный механизм устроен следующим образом: электродвигатель, установленный параллельно главной оси, вращает червя (изготовленного из шпильки). На раме установлена пластина перпендикулярно вверх относительно аккумулятора, на нее крепится гайка прямоугольной формы (изготовленный из куска алюминия), таким образом чтобы она могла свободно двигаться влево и в право, далее в нее вкручивается червь.
Принцип работы такой конструкции заключается в следующем: электродвигатель, вращая червя в одну или другую сторону наклоняет аккумулятор, тем самым перемещает центр тяжести на левую или правую сторону.
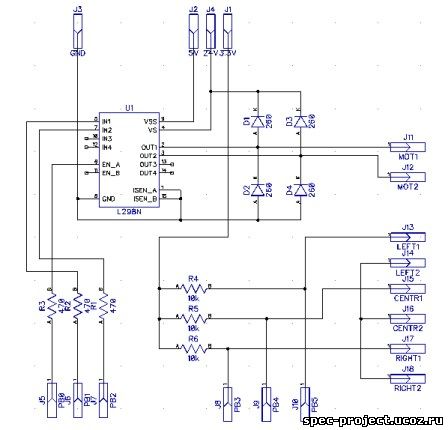
Для контроля положения поворотного механизма были установлены 3 концевика.
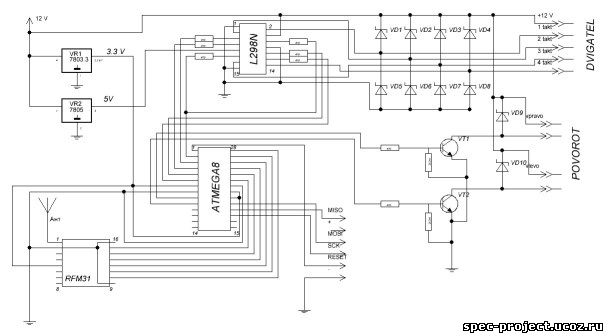
Для управления конструкцией используется пульт дистанционного (ПДУ) управления собранный на микроконтроллере ATmega8. Для передачи управляющих сигналов используется радиопередатчик RFM31. В качестве источника питания используются две пальчиковые батареи по 1,5В.
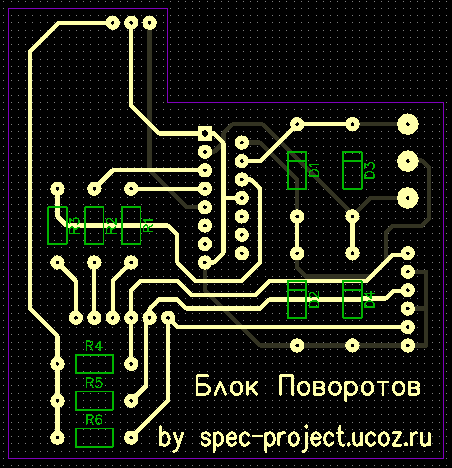
Схема печатной платы выглядит следующим образом:
Блок управления двигателем так же как и ПДУ управляется микроконтроллером ATmega8. Для приема управляющего сигнала используется радио модуль RFM31. Питается система от 24 вольтового аккумулятора.
Микросхема L298N - драйвер двигателя. Позволяет при небольших габаритах управлять двумя электродвигателями постоянного тока с максимальной нагрузкой до 2 А на каждый канал (при параллельном включении каналов – одним двигателем с максимальной нагрузкой до 4 А)
Схема блока выглядит следующим образом:
Общий вид Шара выглядит так (без корпуса):
После первых испытаниях на воде на корпусе шара были приклеены клеевым пистолетом лопасти для лучшего перемещения по воде. Для лучшей герметизации в отверстиях корпуса для крепления оси был использован герметик.